What you should know about ENC28J60 Ethernet Controller before interfacing it?
Functional Blocks :
The ENC28J60 is a stand-alone Ethernet controller with an industry standard Serial Peripheral Interface (SPI™). It is designed to serve as an Ethernet network interface for any controller equipped with SPI.
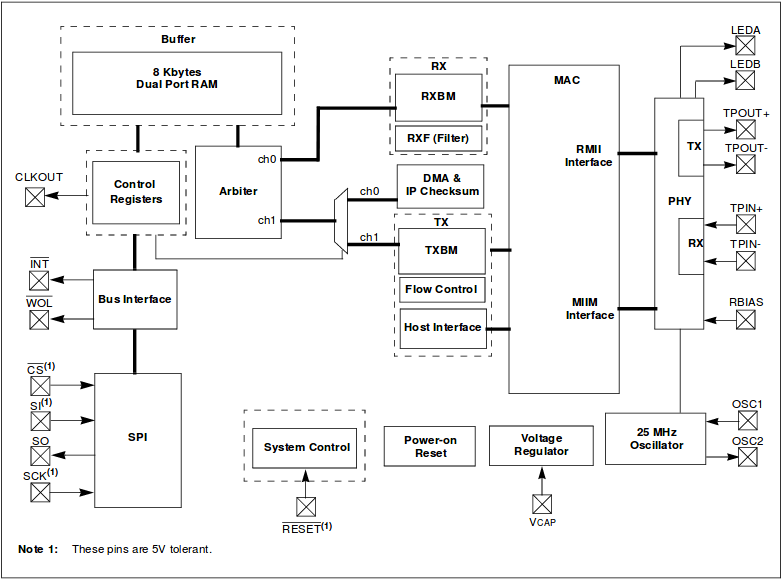
The ENC28J60 consists of seven major functional blocks:
1. An SPI interface that serves as a communication channel between the host controller and the ENC28J60.
2. Control Registers which are used to control and monitor the ENC28J60.
3. A dual port RAM buffer for received and transmitted data packets.
4. An arbiter to control the access to the RAM buffer when requests are made from DMA, transmit and receive blocks.
5. The bus interface that interprets data and commands received via the SPI interface.
6. The MAC (Medium Access Control) module that implements IEEE 802.3 compliant MAC logic.
7. The PHY (Physical Layer) module that encodes and decodes the analog data that is present on the twisted pair interface. The device also contains other support blocks, such as the oscillator, on-chip voltage regulator, level translators to provide 5V tolerant I/Os and system control logic
SERIAL PERIPHERAL INTERFACE (SPI) :
The ENC28J60 is designed to interface directly with the Serial Peripheral Interface (SPI) port available on many micro-controllers. The implementation used on this device supports SPI mode 0,0 only. In addition, the SPI port requires that SCK be at Idle in a low state.
//SPI MODE 0 0 -> CPOL , CPHA set to 0 0 which is already
//CPOL : This bit selects the clock polarity when the bus is idle
//CPHA : This bit determines when the data needs to be sampled.
// SPI Control Register(SPCR)
//SPE – (SPI Enable) The SPI Enable bit is used to enable SPI as a whole
// MSTR – Master/Slave Select This bit is used to configure the device as Master or as Slave
SPCR = (1<<SPE)|(1<<MSTR);
//SPI Status Register(SPSR)
//Set this bit to 1 to enable SPI Double Speed Mode.
SPSR |= (1<<SPI2X);
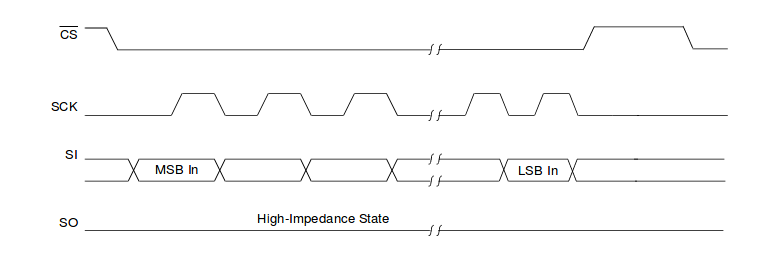
Commands and data are sent to the device via the SI pin, with data being clocked in on the rising edge of SCK.
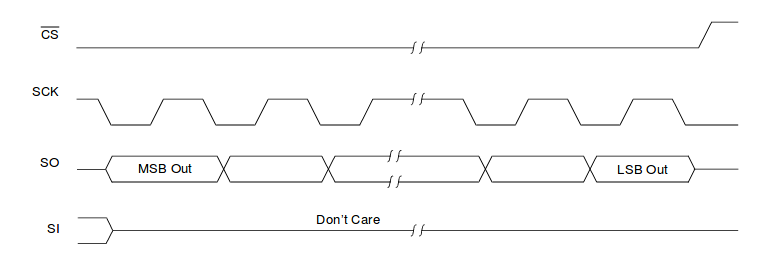
Data is driven out by the ENC28J60 on the SO line, on the falling edge of SCK. The CS pin must be held low while any operation is performed and returned high when finished.
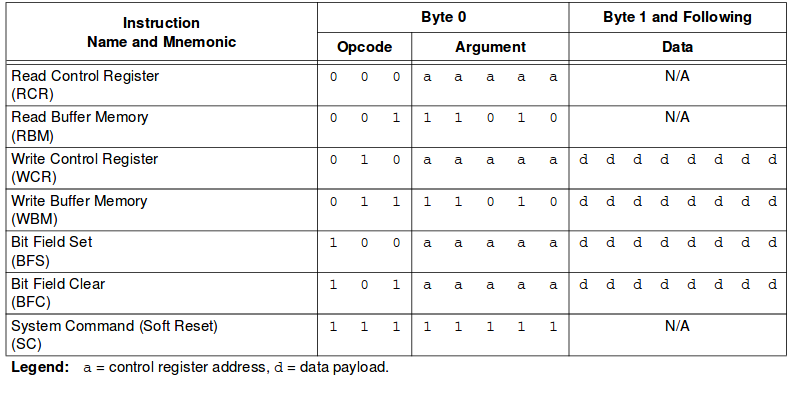
SPI Instruction Set
The operation of the ENC28J60 depends entirely on commands given by an external host controller over the SPI interface. These commands take the form of instructions, of one or more bytes, which are used to access the control memory and Ethernet buffer spaces. At the least, instructions consist of a 3-bit opcode followed by a 5-bit argument that specifies either a register address or a data constant. Write and bit field instructions are also followed by one or more bytes of data. A total of seven instructions are implemented on the ENC28J60.
#define ENC28J60_READ_CTRL_REG 0x00
#define ENC28J60_READ_BUF_MEM 0x3A
#define ENC28J60_WRITE_CTRL_REG 0x40
#define ENC28J60_WRITE_BUF_MEM 0x7A
#define ENC28J60_BIT_FIELD_SET 0x80
#define ENC28J60_BIT_FIELD_CLR 0xA0
#define ENC28J60_SOFT_RESET 0xFF
#define ENC28J60_CONTROL_PORT PORTB
#define ENC28J60_CONTROL_DDR DDRB
#define ENC28J60_CONTROL_CS 4
// set CS to 0 = active
#define CSACTIVE ENC28J60_CONTROL_PORT&=~(1<<ENC28J60_CONTROL_CS)
// set CS to 1 = passive
#define CSPASSIVE ENC28J60_CONTROL_PORT|=(1<<ENC28J60_CONTROL_CS)
//
#define waitspi() while(!(SPSR&(1<<SPIF)))
//Proper Blank Select Mechanism Should Implement
//Read ControlOperation
void ReadControlRegister(unit8_t address)
{
CSACTIVE;
// issue read command
//address is control register
SPDR = ENC28J60_READ_CTRL_REG | address;
waitspi();
// read data
SPDR = 0x00;
waitspi();
// do dummy read if needed (for mac and mii, see datasheet page 29)
if(address & 0x80)
{
SPDR = 0x00;
waitspi();
}
// release CS
CSPASSIVE;
return(SPDR);
}
//Proper Blank Select Mechanism Should Implement
//Write ControlOperation
void WriteControlRegister(uint8_t address, uint8_t data)
{
CSACTIVE;
// issue write command
SPDR = ENC28J60_READ_CTRL_REG | address ;
waitspi();
// write data
SPDR = data;
waitspi();
CSPASSIVE;
}
//Write ControlOperation
void BitFieldSet(uint8_t address, uint8_t data)
{
CSACTIVE;
// issue write command
SPDR = ENC28J60_BIT_FIELD_SET | address ;
waitspi();
// write data
SPDR = data;
waitspi();
CSPASSIVE;
}
MEMORY ORGANIZATION :
All memory in the ENC28J60 is implemented as static RAM. There are three types of memory in the ENC28J60:
- Control Registers
- Ethernet Buffer
- PHY Registers
The Ethernet buffer contains transmit and receive memory used by the Ethernet controller in a single memory space. The sizes of the memory areas are programmable by the host controller using the SPI interface. The Ethernet buffer memory can only be accessed via the read buffer memory and write buffer memory SPI commands
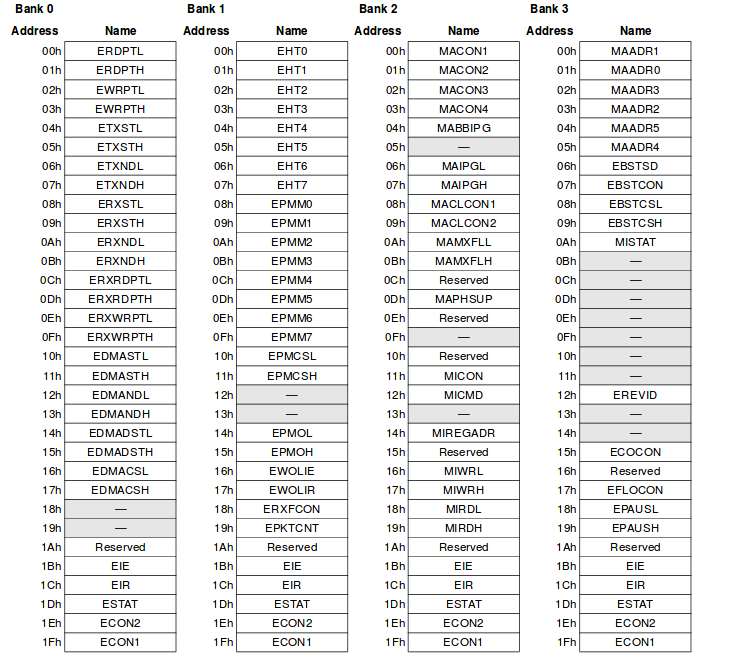
Control Register
The Control Register memory is partitioned into four banks, selectable by the bank select bits BSEL1:BSEL0 in the ECON1 register. Each bank is 32 bytes long and addressed by a 5-bit address value.
The last five locations (1Bh to 1Fh) of all banks point to a common set of registers: EIE, EIR, ESTAT, ECON2 and ECON1. These are key registers used in controlling and monitoring the operation of the device. Their common mapping allows easy access without switching the bank.
INITIALIZATION :
Before the ENC28J60 can be used to transmit and receive packets, certain device settings must be initial- ized. Depending on the application, some configuration options may need to be changed. Normally, these tasks may be accomplished once after Reset and do not need to be changed thereafter
Receive and Transmission Buffer
#define ETXSTL 0x04
#define ETXSTH 0x05
#define ETXNDL 0x06
#define ETXNDH 0x07
#define ERXSTL 0x08
#define ERXSTH 0x09
#define ERXNDL 0x0A
#define ERXNDH 0x0B
#define ERXRDPTL 0x0C
#define ERXRDPTH 0x0D
// The RXSTART_INIT should be zero. See Rev. B4 Silicon Errata
// buffer boundaries applied to internal 8K ram
// the entire available packet buffer space is allocated
//
// start with recbuf at 0/
#define RXSTART_INIT 0x0
// receive buffer end
#define RXSTOP_INIT (0x1FFF-0x0600-1)
// start TX buffer at 0x1FFF-0x0600, pace for one full ethernet frame (~1500 bytes)
#define TXSTART_INIT (0x1FFF-0x0600)
// stp TX buffer at end of mem
#define TXSTOP_INIT 0x1FFF
// Rx start
WriteControlRegister(ERXSTL, RXSTART_INIT&0xFF);
WriteControlRegister(ERXSTH, RXSTART_INIT>>8);
// set receive pointer address
WriteControlRegister(ERXRDPTL, RXSTART_INIT&0xFF);
WriteControlRegister(ERXRDPTH, RXSTART_INIT>>8);
// RX end
WriteControlRegister(ERXNDL, RXSTOP_INIT&0xFF);
WriteControlRegister(ERXNDH, RXSTOP_INIT>>8);
// TX start
WriteControlRegister(ETXSTL, TXSTART_INIT&0xFF);
WriteControlRegister(ETXSTH, TXSTART_INIT>>8);
// TX end
WriteControlRegister(ETXNDL, TXSTOP_INIT&0xFF);
WriteControlRegister(ETXNDH, TXSTOP_INIT>>8);
Receive Filters
The appropriate receive filters should be enabled or disabled by writing to the ERXFCON register.
MAC Initialization Settings
#define MACON1 0x00
#define MACON2 0x01
#define MACON3 0x02
#define MABBIPG 0x04
#define MAIPGL 0x06
#define MAIPGH 0x07
#define MAMXFLL 0x0A
#define MAMXFLH 0x0B
#define MAADR1 0x00
#define MAADR0 0x01
#define MAADR3 0x02
#define MAADR2 0x03
#define MAADR5 0x04
#define MAADR4 0x05
#define MACON1_LOOPBK 0x10
#define MACON1_TXPAUS 0x08
#define MACON1_RXPAUS 0x04
#define MACON1_PASSALL 0x02
#define MACON1_MARXEN 0x01
#define MACON3_PADCFG2 0x80
#define MACON3_PADCFG1 0x40
#define MACON3_PADCFG0 0x20
#define MACON3_TXCRCEN 0x10
#define MACON3_PHDRLEN 0x08
#define MACON3_HFRMLEN 0x04
#define MACON3_FRMLNEN 0x02
#define MACON3_FULDPX 0x01
// max frame length which the conroller will accept:
#define MAX_FRAMELEN 1500 // (note: maximum ethernet frame length would be 1518)
// enable MAC receive
WriteControlRegister(MACON1, MACON1_MARXEN|MACON1_TXPAUS|MACON1_RXPAUS);
// bring MAC out of reset
WriteControlRegister(MACON2, 0x00);
// enable automatic padding to 60bytes and CRC operations
BitFieldSet(MACON3, MACON3_PADCFG0|MACON3_TXCRCEN|MACON3_FRMLNEN);
// set inter-frame gap (non-back-to-back)
WriteControlRegister(MAIPGL, 0x12);
WriteControlRegister(MAIPGH, 0x0C);
// set inter-frame gap (back-to-back)
WriteControlRegister(MABBIPG, 0x12);
// Set the maximum packet size which the controller will accept
// Do not send packets longer than MAX_FRAMELEN:
WriteControlRegister(MAMXFLL, MAX_FRAMELEN&0xFF);
WriteControlRegister(MAMXFLH, MAX_FRAMELEN>>8);
// write MAC address
// NOTE: MAC address in ENC28J60 is byte-backward
WriteControlRegister(MAADR5, macaddr[0]);
WriteControlRegister(MAADR4, macaddr[1]);
WriteControlRegister(MAADR3, macaddr[2]);
WriteControlRegister(MAADR2, macaddr[3]);
WriteControlRegister(MAADR1, macaddr[4]);
WriteControlRegister(MAADR0, macaddr[5]);
PHY Initialization Settings
#define PHCON2 0x10
#define MIREGADR 0x14
#define MIWRL 0x16
#define MIWRH 0x17
#define PHCON2_FRCLINK 0x4000
#define PHCON2_TXDIS 0x2000
#define PHCON2_JABBER 0x0400
#define PHCON2_HDLDIS 0x0100
#define MISTAT 0x0A
#define MISTAT_BUSY 0x01
void enc28j60PhyWrite(uint8_t address, uint16_t data)
{
// set the PHY register address
WriteControlRegister(MIREGADR, address);
// write the PHY data
WriteControlRegister(MIWRL, data);
WriteControlRegister(MIWRH, data>>8);
// wait until the PHY write completes
while(ReadControlRegister(MISTAT) & MISTAT_BUSY){
_delay_us(15);
}
}
enc28j60PhyWrite(PHCON2, PHCON2_HDLDIS);