Robotics Arm
::: warning
Documentation is being updated .....
:::
Introduction
One of the main focus of Robotics in present day , is to mimic the human body . Current trends includes artificial intelligence : Sophiya and humanoid : Asimo , each mimicking human intelligence and motion
The most valuable and versatile part of human body include human arm . One of the most important field of robotics is industrial robotics and which in it's self is based on the robotics arm
To have the better understanding of industrial robotics , One must study robotics arm , it's concept , Mechanism and control
Concept :
A robotic arm is a type of mechanical arm, usually programmable, with similar functions to a human arm; the arm may be the sum total of the mechanism or may be part of a more complex robot. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement.
The end part of the manipulator is called the end effector and it is analogous to the human hand.
Terms
Link & Joints:
Link is an assembly between joints , which are connected to manage and transfer forces and movement. Joints are to used connect links. It allows relative movement of links in certain degree of freedom
Degree of freedom
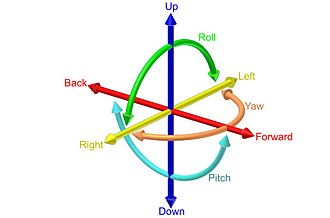
Degree of freedom is the number of ways (as shown in figure) , the robot can define the position of it's end effector
Workspace
The robot workspace (sometimes known as reachable space) is all places that the end effector (gripper) can reach. The workspace is dependent on the DOF angle/translation limitations, the arm link lengths, the angle at which something must be picked up at, etc. The workspace is highly dependent on the robot configuration.
Forward and Inverse Kinematics
In order to plan a robot’s movements, we have to understand the relationship between the actuators that we can control and the robot’s resulting position in the environment.
For static arms, this is rather straightforward: if we know the position/angle of each joint, we can calculate the position of its end-effectors using trigonometry. This process is known as forward kinematics.
If we calculate the position of each joint needed to be at for a specified position of end-effector , This is known as inverse kinematics.